

L'11 e 12 luglio è l’Amazon Prime Day. Seguite tutte le offerte più interessanti direttamente da questa pagina!
Tagliare il prato d'estate è estenuante e anche se ci sono dei robot che possono farlo al posto nostro, sono parecchio costosi. Ma se vi dicessimo che è possibile costruire un tagliaerba robot e comandarlo con un Raspberry Pi?
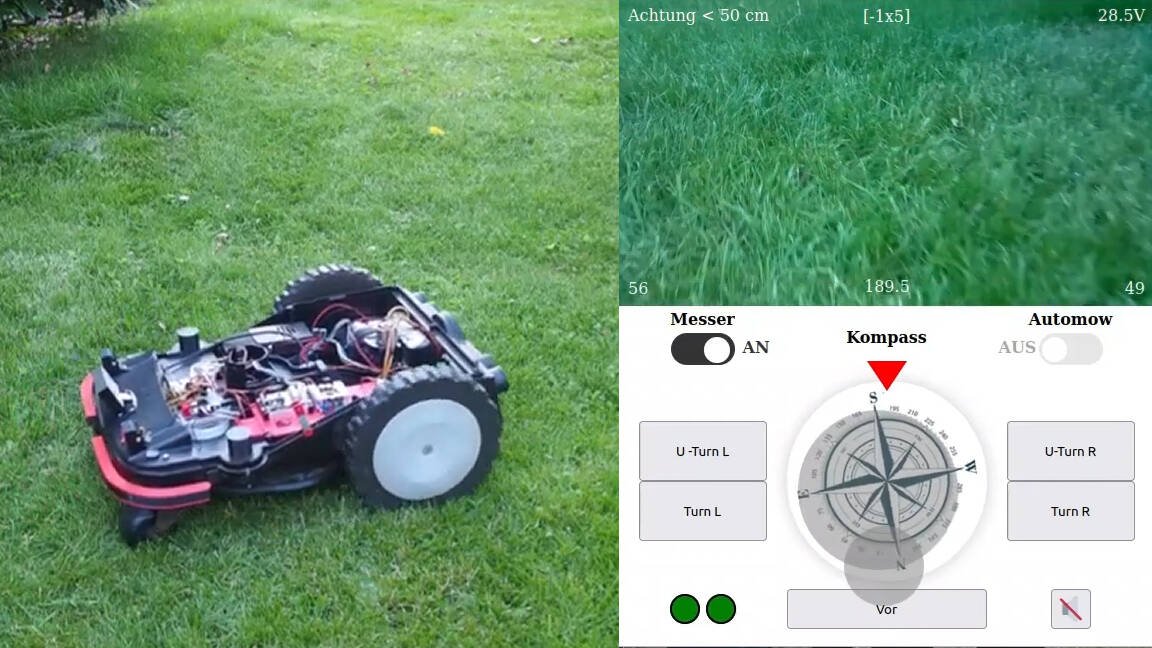
Il progetto è stato creato da Ulli, maker volto del canale YouTube Greenkeeper with Raspberry Pi. Ci sono voluti svariati mesi di lavoro e l'aiuto di TGD-Consulting per sviluppare il tutto e creare un software che fosse facile da usare, ma alla fine il maker è riuscito a creare un tagliaerba totalmente automatico. Attualmente il progetto è ancora in via di sviluppo e il tagliaerba è assemblato con vari elementi stampati in 3D, ma pur essendo lontano dalla sua "forma finale", è già stato testato con risultati incoraggianti.
Il software, chiamato dal team PiMowBotIT-SW, si controlla tramite interfaccia web, che permette di vedere quello che vede il tagliaerba (equipaggiato con una Pi Camera), controllare il movimento e modificare alcune impostazioni. A bordo del tagliaerba ci sono diversi sensori e strumenti che gli permettono di muoversi e capire dove deve tagliare l'erba.
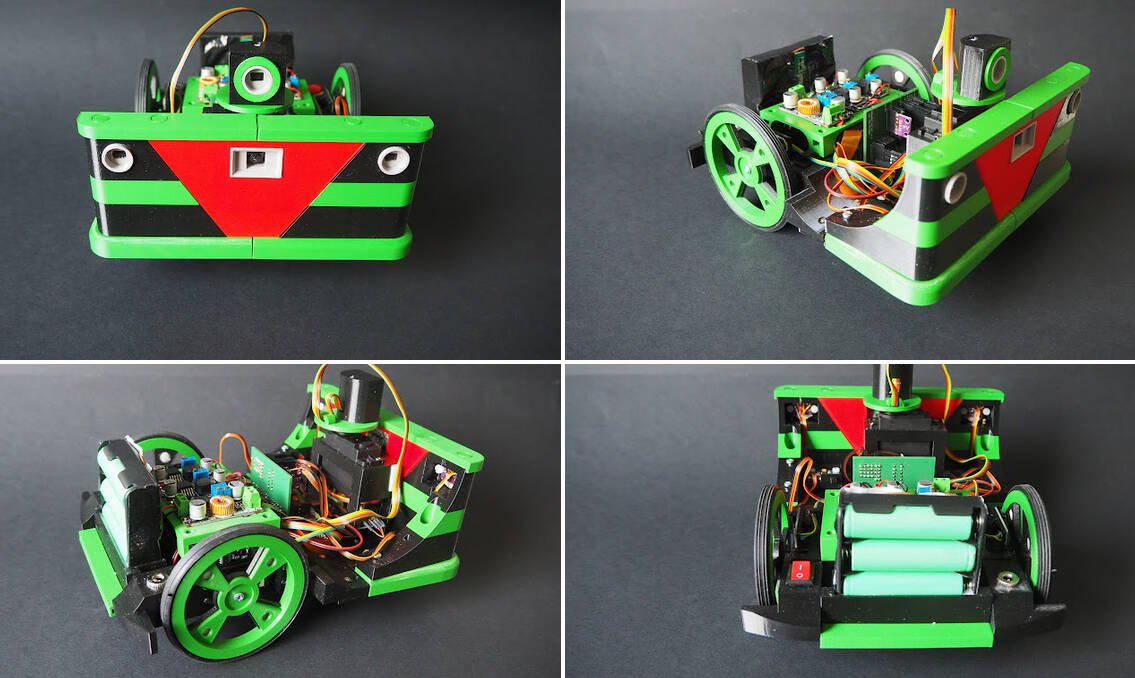
Il tagliaerba è configurato in modo tale da muoversi unicamente sul colore verde, in modo da evitare imprevisti, inoltre sarà equipaggiato con una scheda progettata appositamente per semplificare la connessione tra il Raspberry Pi e i vari sensori; altra notizia interessante è che, sebbene alla base del progetto ci sia un Raspberry Pi 4, stando agli sviluppatori il software sarebbe compatibile anche con altri modelli.
PiMowBotIT gira su una versione molto leggera di Raspberry Pi OS e sul sito di TGD-Consulting è presente una panoramica che offre una visione del progetto dal punto di vista dello sviluppo del software, oltre a spigare in maniera abbastanza dettagliata quale hardware è possibile usare per costruire il robot.